




لیزرتحلیل و پردازش سیگنال تشخیص گفتار از راه دور
رمزگشایی نویز سیگنال: تحلیل و پردازش سیگنال تشخیص گفتار از راه دور با لیزر
در عرصه شگفتانگیز فناوری، تشخیص گفتار از راه دور با لیزر مانند یک سمفونی زیباست، اما این سمفونی «نویز» خاص خود را نیز دارد - نویز سیگنال. مانند یک تماشاگر پر سر و صدای غیرمنتظره در یک کنسرت، نویز اغلب باعث اختلال در ...تشخیص گفتار با لیزرطبق گفته منبع، نویز تشخیص سیگنال گفتار از راه دور با لیزر را میتوان تقریباً به نویز ایجاد شده توسط خود دستگاه اندازهگیری ارتعاش لیزر، نویز ایجاد شده توسط سایر منابع صوتی نزدیک به هدف اندازهگیری ارتعاش و نویز تولید شده توسط اختلالات محیطی تقسیم کرد. تشخیص گفتار از راه دور در نهایت نیاز به دریافت سیگنالهای گفتاری دارد که توسط شنوایی انسان یا ماشین قابل تشخیص باشند و بسیاری از نویزهای مختلط از محیط خارجی و سیستم تشخیص، قابلیت شنیدن و فهم سیگنالهای گفتاری به دست آمده را کاهش میدهند و توزیع باند فرکانسی این نویزها تا حدی با توزیع باند فرکانسی اصلی سیگنال گفتار (حدود 300 تا 3000 هرتز) منطبق است. نمیتوان آن را به سادگی با فیلترهای سنتی فیلتر کرد و پردازش بیشتر سیگنالهای گفتاری شناسایی شده مورد نیاز است. در حال حاضر، محققان عمدتاً نویززدایی نویز پهن باند غیر ایستا و نویز ضربهای را مطالعه میکنند.
نویز پسزمینه پهنباند عموماً توسط روش تخمین طیف زمان کوتاه، روش زیرفضا و سایر الگوریتمهای سرکوب نویز مبتنی بر پردازش سیگنال، و همچنین روشهای سنتی یادگیری ماشین، روشهای یادگیری عمیق و سایر فناوریهای بهبود گفتار برای جداسازی سیگنالهای گفتار خالص از نویز پسزمینه پردازش میشود.
نویز ضربهای، نویز لکهای است که ممکن است توسط اثر لکهای پویا ایجاد شود، زمانی که محل هدف تشخیص توسط نور تشخیص سیستم تشخیص LDV مختل میشود. در حال حاضر، این نوع نویز عمدتاً با تشخیص مکانی که سیگنال دارای پیک انرژی بالایی است و جایگزینی آن با مقدار پیشبینیشده، حذف میشود.
تشخیص گفتار از راه دور لیزری، چشماندازهای کاربردی در زمینههای بسیاری مانند رهگیری، نظارت چند حالته، تشخیص نفوذ، جستجو و نجات، میکروفون لیزری و غیره دارد. میتوان پیشبینی کرد که روند تحقیقات آینده در زمینه تشخیص گفتار از راه دور لیزری عمدتاً مبتنی بر (1) بهبود عملکرد اندازهگیری سیستم، مانند حساسیت و نسبت سیگنال به نویز، بهینهسازی حالت تشخیص، اجزا و ساختار سیستم تشخیص؛ (2) افزایش سازگاری الگوریتمهای پردازش سیگنال، به طوری که فناوری تشخیص گفتار لیزری بتواند با فواصل اندازهگیری مختلف، شرایط محیطی و اهداف اندازهگیری ارتعاش سازگار شود؛ (3) انتخاب معقولتر اهداف اندازهگیری ارتعاش و جبران فرکانس بالای سیگنالهای گفتاری اندازهگیری شده روی اهداف با ویژگیهای پاسخ فرکانسی مختلف؛ (4) بهبود ساختار سیستم و بهینهسازی بیشتر سیستم تشخیص از طریق
کوچکسازی، قابلیت حمل و فرآیند تشخیص هوشمند.
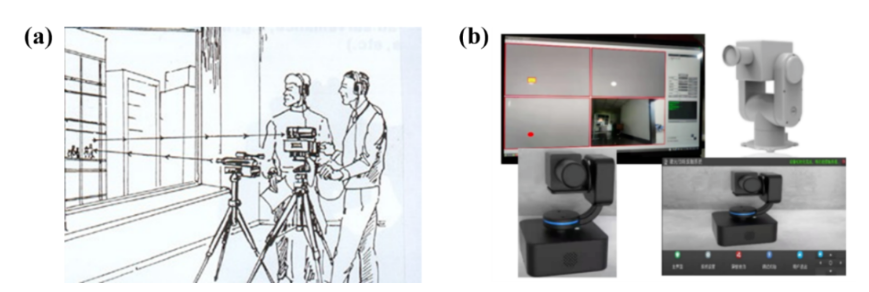
شکل 1 (الف) نمودار شماتیک رهگیری لیزری؛ (ب) نمودار شماتیک سیستم ضد رهگیری لیزری
زمان ارسال: ۱۴ اکتبر ۲۰۲۴